|
رباتیک والکترونیک روبواچ پیRoboHp رباتیک والکترونیک |
|||
|
جمعه 10 مرداد 1393برچسب:رباتیک,ربات,فروشگاه رباتیک,اموزش ساخت ربات,خریدربات,پروژهای رباتیک,پروژهای الکترونیک,روبواچ پی,robohp, :: 1:32 :: نويسنده : پهلوان پور
چگونه gripper ربات طراحی کنیم ؟سلام ؛ امروز هوس کردم کمی درباره end effector های ربات بنویسم که ترجمش به فارسی می شه : عملگر نهایی ، یعنی کار یا عملی که ربات به وسیله این ابزار در نهایت یک جابجایی انجام می دهد . خَب ، end effector ها انواع مختلفی دارند مثل برش لیزر که یک مقاله هم در این باره حدود 4 سال پیش نوشتم و در آرشیو مقالات موجود هست . اما امروز قصد دارم درباره یک نوع خاص و پرکاربرد حرف بزنم که بیشتر برای عمل برداشتن و گذاشتن یا pick & place استفاده دارند . درست حدس زدید : Gripper نمی دونم تا به حال به فکر این افتادید که یک گریپر بسازید یا نه ؟ اگر بهش فکر کردید باید مکانیزم های جالبی هم به ذهنتون رسیده باشه . همانطور که می دانید grip به معنای گیره است و gripper هم مکانیزمی است که به وسیله آن می توان جسمی را احاطه کرده و آن را جابجا کرد و سپس به مقصد منتقل کرده و آن را رها نمود .
بله دست خود را کم نگیرید یا شاید خودتان را دست کم نگیرید ! توانایی برداشتن و نگه داشتن اشیا یکی از مهارت های انسان است که ربات ها هنوز به شکل کامل به آن دست نیافته اند و در اغلب موارد گریپر های ساخته شده قادر نیست هر شی ای را بردارد و نگه دارد . تلاش های زیادی برای رسیدن به یک مکانیزم بی نقص انجام گرفته است که همگی با تمرکز بر دستی شبیه به انسان است و طبیعی هم به نظر می رسد ، چرا که انگشتان و دست های ما حاصل تکامل میلیون ها سال بوده تا به شکل امروزی در آمده است . اما هنوز تمام نکات باریک طبیعت کشف نشده است . انگشتان رباتیک نیاز به یک سیستم کنترل متمرکز دارند تا جریان داده ها را از سنسور های تماسی و بینایی هدایت کند و سپس محاسبه کند که چطور یک عمل برداشتن را اجرا کند . انسان به شکلی کاملا ً بدیهی و طبیعی یا راه میانبر و کوتاهترین راه را انتخاب می کند یا این عملیات را ساده سازی می کند . آخرین باری که دست خود را به طرف یک لیوان آب بردید چقدر به این فکر کردید که تا چه اندازه دست خود را جلو ببرید یا با چه سختی باید لیوان را با انگشتانتان بگیرید ؟! شاید راه دیگری هم باشد که ربات آنگونه این کار را انجام دهد ، آقای Eric Brown به همراه چند تن از دوستانش در دانشگاه شیکاگو ، یک gripper جالب طراحی کرده اند که می تواند هر شکلی را با نیرویی مناسب بگیرد و بلند کند ، بدون هیچ گونه سیستم لامسه و یا فیدبک تصویری و بصری !
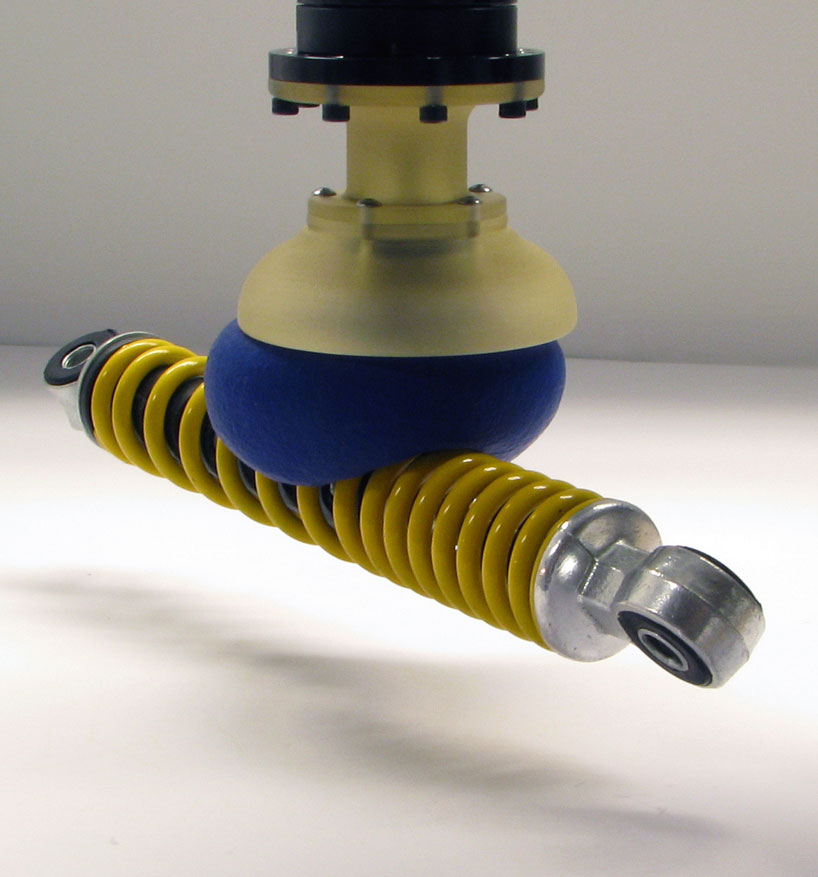
با پمپاژ هوا کیسه منقبض شده و دو نتیجه حاصل می شود . ابتدا تماس بین کیسه و شیء محکم می شود و سپس دانه های قهوه به شیء نیرو وارد می کنند . مبتکرین این گریپر ادعا می کنند که به کاربردن پمپ خلاء باعث می شود که گریپر در نگه داشتن اجسام استحکام قابل توجهی داشته باشد ضمن اینکه شکل اجسام کاملاً حفظ می شود .
بنابراین سه عامل در عملِ گرفتن جسم دخیل هستند ؛ اول اصطکاک بین کیسه و سطح جسم و اثر مکش که کیسه را به شکل کیپ و محکم دور تا دور جسم جمع می کند و در نهایت ، کیسه ای که به دور جسم قفل شده و به شکل یکپارچه با گریپر در آمده است مانع از سقوط جسم می گردد .
آن ها همچنین می گویند با سیستم گریپر گرانولی ( دانه ای ) می توانید بی هیچ محدودیتی هر جسمی را از یک پیچ استیل گرفته تا تخم مرغ خام حرکت دهید و البته این گریپر می تواند چندین شی ء را بدون اینکه موقعیت نسبی شان تغییری کند ، گرفته و جابجا کند . و امــا ، نمی شود گفت این گریپر خالی از هر گونه عیبی است و مثل خیلی از گریپر های دیگر دارای محدودیت هایی است . مثلا ً تصور کنید این کیسه قهوه بخواهد یک CD یا یک تکه پنبه را بگیرد و نگه دارد . به هر حال در خیلی از کاربرد ها چنین اتفاقات نا خوشایندی مهم نیست . بلکه نسبت به خیلی از گریپر ها به دلیل عدم نیاز به سیستم بینایی و لامسه و نیز مرکز کنترل و محاسبات پیچیده این گریپر یک گزینه کم هزینه و مناسب ارزیابی می شود .
ضمنا ً این هم یک نسخه ربات بسکتبالیست که حاصل نتایج تحقیقات روی این gripper هست . راستی در ساخت این گریپر بهترین ماده برای پوشش محفظه گرانولی لاتکس با ضخامت مناسب دانه انتخاب شده است و به جای قهوه می توان از شن یا ماسه نرم هم استفاده کرد .
نظرات شما عزیزان:
درباره سایت به فروشگاه رباتیک والکترونیک RoboHpخوش آمدید آخرین مطالب پيوندها نويسندگان
|
|||
|
|
 مکانیزمی که اغلب ما در ابتدا در ذهنمان نقش می بندد الهام گرفته از مکانیزمی است که هزاران هزار سال است انسان از آن استفاده می کند ، یعنی انگشتان دست . دست انسان یکی از پیچیده ترین مکانیزم های موجود در جهان را داراست و شبیه سازی آن در ربات ها کار چندان ساده ای نیست .
مکانیزمی که اغلب ما در ابتدا در ذهنمان نقش می بندد الهام گرفته از مکانیزمی است که هزاران هزار سال است انسان از آن استفاده می کند ، یعنی انگشتان دست . دست انسان یکی از پیچیده ترین مکانیزم های موجود در جهان را داراست و شبیه سازی آن در ربات ها کار چندان ساده ای نیست . این گریپر به طرز وحشتناکی ساده است ! این گریپر از یک کیسه لاستیکی مهر و موم شده که پر از دانه حبوبات یا ... است ( در این مورد دانه قهوه ) ساخته شده که به یک پمپ هوا متصل شده است . ایده این است که هنگام قرار گرفتن این کیسه لاستیکی بالای سر شیء دانه های داخل کیسه با مکش جابجا شده و آزادانه دور شیء حرکت کنند تا کیسه آن جسم را در بر بگیرد .
این گریپر به طرز وحشتناکی ساده است ! این گریپر از یک کیسه لاستیکی مهر و موم شده که پر از دانه حبوبات یا ... است ( در این مورد دانه قهوه ) ساخته شده که به یک پمپ هوا متصل شده است . ایده این است که هنگام قرار گرفتن این کیسه لاستیکی بالای سر شیء دانه های داخل کیسه با مکش جابجا شده و آزادانه دور شیء حرکت کنند تا کیسه آن جسم را در بر بگیرد .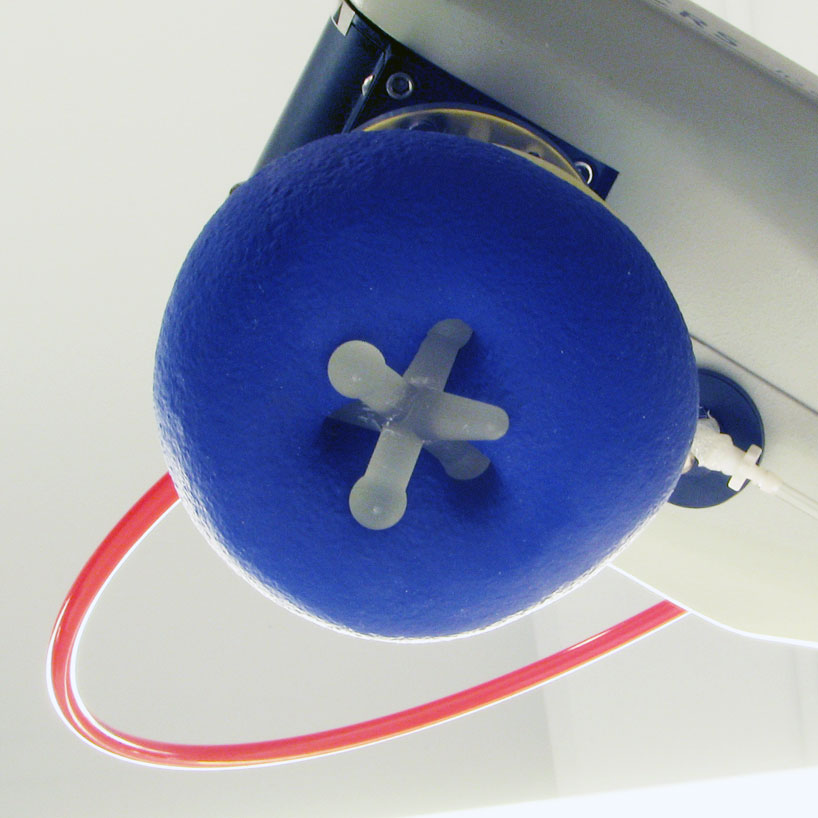

 Brown و هم تیمی هایش عنوان کردند تنها با گرفتن بخشی از سطح جسم می توان آن را به شکلی کاملا ً ایمن حمل کرد و این یعنی سازگاری بسیار بالا که در نمونه های رایج کمتر وجود دارد که روی هر نوع جسمی بشود کار کرد .
Brown و هم تیمی هایش عنوان کردند تنها با گرفتن بخشی از سطح جسم می توان آن را به شکلی کاملا ً ایمن حمل کرد و این یعنی سازگاری بسیار بالا که در نمونه های رایج کمتر وجود دارد که روی هر نوع جسمی بشود کار کرد .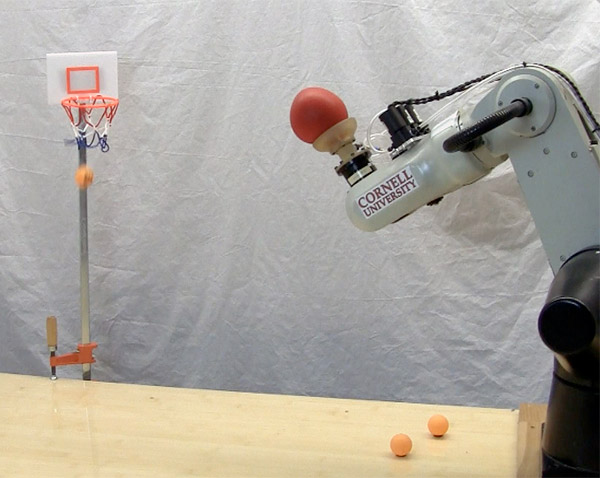 البته متذکر می شوم که این طرح ابتکاری حاصل همکاری تیمی از دانشگاه شیکاگو با تیم تحقیقاتی دیگر از آزمایشگاه محاسبات سنتزی (cornell (ccsl است .
البته متذکر می شوم که این طرح ابتکاری حاصل همکاری تیمی از دانشگاه شیکاگو با تیم تحقیقاتی دیگر از آزمایشگاه محاسبات سنتزی (cornell (ccsl است .